

Hace un par de días un colega me pedía ayuda sobre un proyecto con arduino, y para ello requería hacer ciertas pruebas como mover un servo, aproveche la oportunidad para escribir esto y como el único servo que tenia a la mano era un VIGOR VS-2, puede decidí usarlo. Checando la hoja de datos se puede ver que el servo se mueve de 800 a 2200 microsegundos (no voy a explicar la teoría se los servos, eso es tarea de ustedes), así que en este pequeño ejemplo haremos un barrido para que el servo gire de 0 a 170 grados y de 170 a 0 grados aproximadamente, que es lo que menciona su hoja de datos.
Circuito:
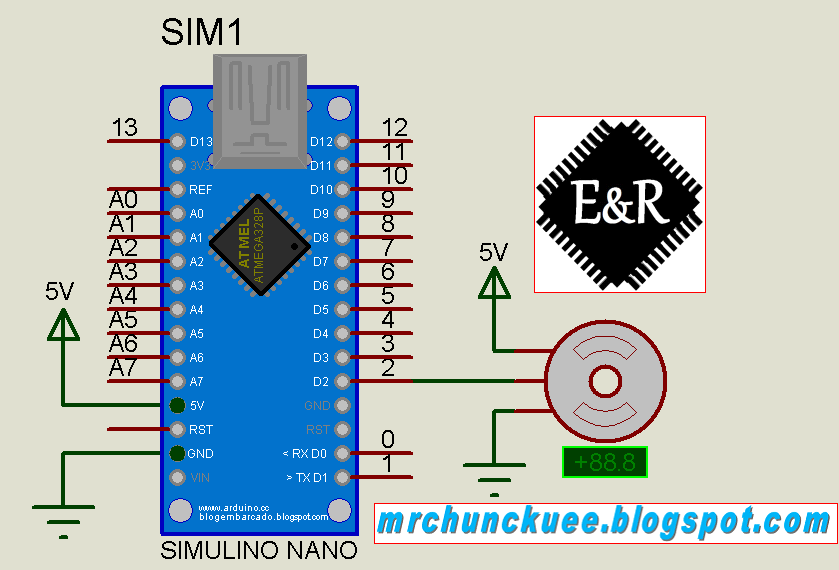
El circuito utilizado es muy sencillo, solo debemos conectar el cable de control del servo al pin D2 de nuestro arduino nano, como se muestra a continuación:
Código:
Aquí el código que hace posible esto, debo mencionar que en la red hay mucho de esto, incluso arduino trae un demo para el control de un servo, pero yo decidí usar la instrucción "myservo.writeMicroseconds()" para tener un movimiento mas fino, ademas de facilitar mucho al colocar los rangos del barrido:
Descargas:
Aquí el enlace directo para DESCARGAR los archivos disponibles, también puedes revisar o descargar la información desde mi repositorio en GitHub, si no sabes como descargarlo puedes checar aquí, bueno por el momento es todo si tienes dudas, comentarios, sugerencias, inquietudes, traumas, etc. dejarlas y tratare de responder lo mas pronto posible.
Donaciones:
Si te gusta el contenido o si los recursos te son de utilidad, comparte el enlace en tus redes sociales o sitios donde creas que puede ser de interés y la otra puedes ayudarme con una donación para seguir realizando publicaciones y mejorar el contenido del sitio. También puedes hacer donaciones en especie, ya sea con componentes, tarjetas de desarrollo o herramientas. Ponte en contacto para platicar, o puedes volverte uno de nuestros sponsors.
Pido una retroalimentación avisando cada que un enlace no sirva o tenga errores al momento de abrirlo, así también si una imagen no se ve o no carga, para corregirlo en el menor tiempo posible.











{kind=link}
0 Comentarios